为应对协作机器人多变的工作环境,增强协作机器人适应性能,泰科在2019年底推出RJSII系列关节模组,采用全新的关节设计,具有更好的散热性能和力矩输出能力及稳定性,同时也提升了关节的防护等级,使之可以更好的应用于各种苛刻的工作环境,目前主要应用于小负载的协作机器人。
为满足大负载协作机器人需求,泰科推出RJSII系列新型RJSII40关节模组,采用额定功率为1050的无刷伺服力矩电机和品牌减速器,在确保RJSII40关节模组的输出性能及强大的负载转矩能力,更具稳定性。
泰科智能机器人关节模组
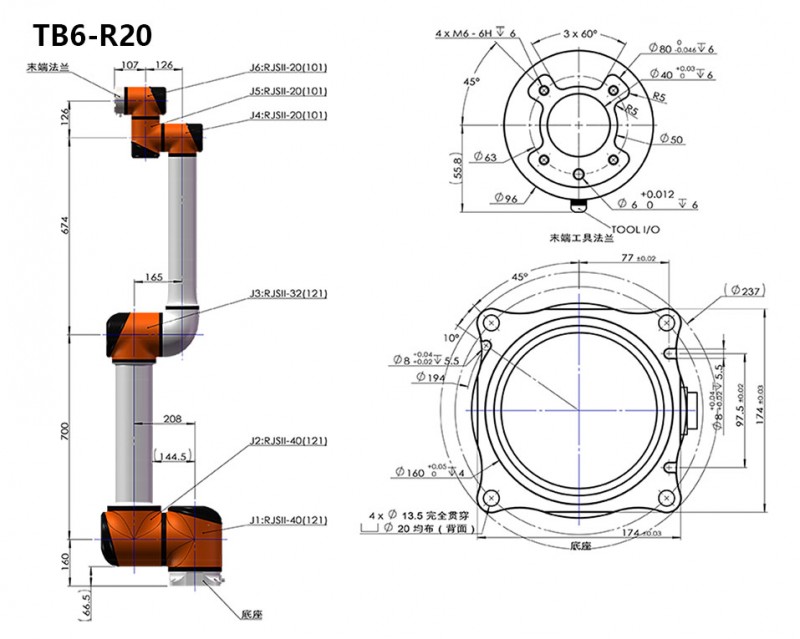
RJSII40模组本体重量高达17kg,专业应用于负载20kg工业协作机械臂上,在确保1500mm的工作半径同时,很好的降低了机械手臂的重心,增强了稳定性和提高臂的负载能力。