
品牌:西门子
起订:1台
供应:100台
发货:1天内
立即购买
西门子6AV6381-2BE07-5AV0原装现货销售,西门子6AV6381-2BE07-5AV0原装现货销售,WinCC V7.5 亚洲版基本系统: 运行版 支持2048个外部变量 (RT 2048) DCS从传统的仪表盘监控系统发展而来。因此,DCS从先天性来说较为侧重仪表的控制,比如我们使用的YOKOGAWACS3000DCS系统甚至没有PID数量的限制(PID,比例微分积分算法,是调节阀、变频器闭环控制的标准算法,通常PID的数量决定了可以使用的调节阀数量)。PLC从传统的继电器回路发展而来,初的PLC甚至没有模拟量的处理能力,因此,PLC从开始就强调的是逻辑运算能力。
2、从系统的可扩展性和兼容性的方面来说:
市场上控制类产品繁多,无论DCS还是PLC,均有很多厂商在生产和销售。对于PLC系统来说,一般没有或很少有扩展的需求,因为PLC系统一般针对于设备来使用。一般来讲,PLC也很少有兼容性的要求,比如两个或以上的系统要求资源共享,对PLC来讲也是很困难的事。而且PLC一般都采用专用的网络结构,比如西门子的MPI总线性网络,甚至增加一台操作员站都不容易或成本很高。
SM322-1HH01也能在负载电压为交流24V的情况下工作吗?
是的,您也可以在负载电压为交流24V的情况下使用SM322-1HH01。
周峰:18811848019
西门子6AV6381-2BE07-5AV0原装现货销售
指令名称:速度运行指令
功能:使轴以预设的速度运行
『注意』部分输入/输出管脚没有具体介绍,请用户参考MC_Power指令中的说明。
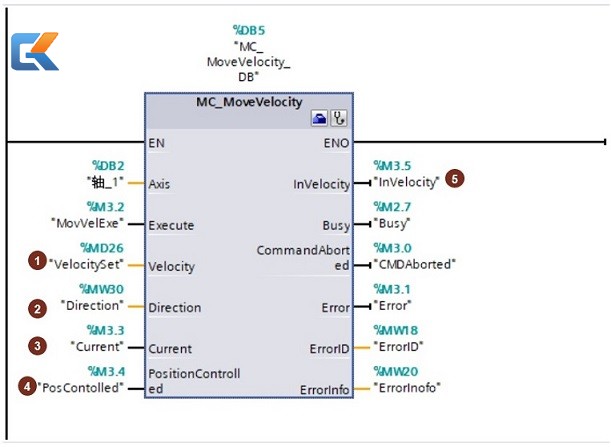
指令输入端:
①Velocity:轴的速度。
②Direction:方向数值
- Direction = 0:旋转方向取决于参数“Velocity”值的符号
- Direction = 1:正方向旋转,忽略参数“Velocity”值的符号
- Direction = 2:负方向旋转,忽略参数“Velocity”值的符号
③Current:
- Current = 0:轴按照参数“Velocity”和“Direction”值运行
- Current = 1:轴忽略参数“Velocity”和“Direction”值,轴以当前速度运行。
④PositionControlled:
- PositionControlled= 0:非位置控制即运行在速度控制模式
- PositionControlled= 1: 位置控制操作即运行在位置控制模式
『注意』 只要执行指令 MC_MoveVelocity 即应用该参数。之后,MC_Power 的设置再次适用。使用 PTO 轴时忽略该参数。
⑤InVelocity :
- InVelocity= 0:输出未达到速度设定值
- InVelocity= 1: 输出已达到速度设定值
『注意』可以设定“Velocity”数值为0.0,触发指令后轴会以组态的减速度停止运行。相当于MC_Halt指令。

