本文上位机控制和下位机控制组态软件进行了简单的对比,通过一些典型示例说明了分别适合上位机和下位机控制的场合。
当前组态软件在工业控制中得到了日益广泛的应用。组态软件依据自身的过程数据库,下连各种硬件设备,并通过动态人机界面可以将采集处理的数据展现给用户,或者传递给其他应用程序。其结构如图所示:
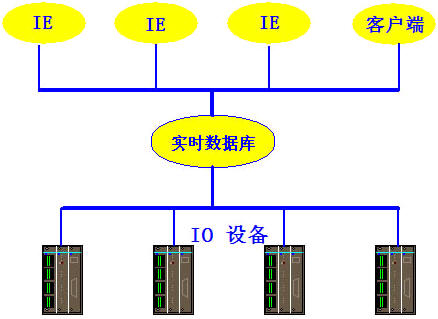
图1 组态软件结构图
组态软件的出现,由于其预先提供了各种常用组件和相关设备驱动,一方面将监控系统设计的难度大为降低,开发相关系统的时间也大为缩短,另一方面,由于可以自由连接多种设备,提供了一个平台,用户可以依据需要设计出成本最优的工程。
对于硬件设备,特别是可编程的PLC等硬件,自身具有一定的控制功能,而可以连接PLC等硬件的组态软件也可以通过脚本等执行一定的控制功能,那么控制是交给上位机的组态软件,还是下位机的PLC呢?这里先对两者做一个简单的比较:
下位机控制
下位机可以执行一些相关的控制动作,优点在于其速度快,可靠性高,稳定。其缺点在于受到其自身的限制,对于一些特殊的复杂控制,以及和其他特殊设备相关或者涉及到关系数据库等控制功能作无法执行。
上位机控制
上位机的组态软件同样可以执行一定的控制动作,其优点在于脚本编写更容易,而且可以方便可执行涉及到多个设备以及关系数据库或者其他数据的控制动作,能充分发挥自身系统的优势。缺点在于有时会遇到上位机和下位机通讯的时间瓶颈,而且通常组态软件运行工控机在其他操作系统上,其稳定性和PLC等有差距。
在实际工程中,应该根据需要来进行相关的控制分布。下面通过一些典型示例进行说明:
适合下位机控制场合
对于一些实时性要求较高,或者上位机和下位机通讯较慢或容易受到干扰的情况下,建议把关键的控制放在下位机执行。比如对于一些典型的水利项目,比如水质监测,其运行监测系统的子站和运行组态软件的中心站可能相距较远,其通讯可能采用数传电台,拨号,GSM,GPRS等方式。在这种情况下,由于其通讯距离远,可能会有些延迟,所以控制功能更多的放在了下位机,而上位机主要负责数据的采集,存储和显示,也可包含一些对下位机的设置功能。
适合上位机控制的场合
对于一些和关系数据库或者多种设备相关的控制功能,单纯的依靠下位机进行控制,可能非常麻烦或者难以实现,这种情况下建议由上位机进行控制。比如车站的灯光控制,需要获取火车的行车信号以及其他数据来进行判断是否亮灯,而行车信号一般存在数据库或者需要从引导系统中获取,这种情况下,如果其控制几乎全部由上位机实现。
在更多的时候,是根据控制功能自身的特点来进行相关设置。下位机和上位机可以根据需要各执行相关部分控制功能,实时性要求较高的控制可以放到下位机,复杂的,关联其他数据的控制可以放在上位机,两者在一起构成一个完备的控制系统。合理的进行分配,不仅可以减少劳动量,而且可以提高工程的健壮性。

