引言
在交流电机变频调速中pwm控制已经得到了日益广泛的应用,其中经典的正弦脉宽调制(spwm),它主要着眼于使逆变器输出的电压尽量接近正弦波,使pwm电压波的基波成分尽量大,谐波成分尽量小,但是该方法仅仅是一种近似,抑制谐波的能力有限。而电压空间矢量脉宽调制(svpwm)是把逆变器和电机视为一体,控制电机获得幅值恒定的圆形旋转磁场。它能够明显地减少逆变器的输出电压的谐波成分及电动机的谐波耗损,降低了转矩的脉动。本文根据矢量控制和svpwm调制原理,建立了仿真模型,并对仿真中的关键问题和仿真结果进行了分析。
系统仿真模型的建立
基于svpwm的矢量控制模型
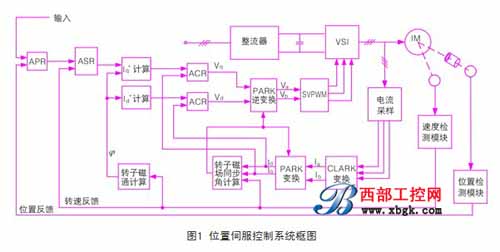
图1为位置伺服控制系统框图,该系统通过clarke变换和park变换将检测到的三相定子电流变换成同步旋转坐标系下的直流分量id、iq作为电流反馈。给定位置与位置反馈的偏差值经过p调节器,输出作为用于转速控制的转速输入,位置环的输出与反馈转速的偏差经pi调节器,输出作为用于转矩控制的电流q轴分量,和通过变换计算的电流d轴分量,与电流反馈的偏差经pi调节器分别输出q、d同步旋转坐标轴下的电压分量vq、vd、vq、vd再经过park逆变换转换成两相静止坐标系下的电压分量vα、vβ。最后采用svpwm技术产生pwm控制信号来控制逆变器。
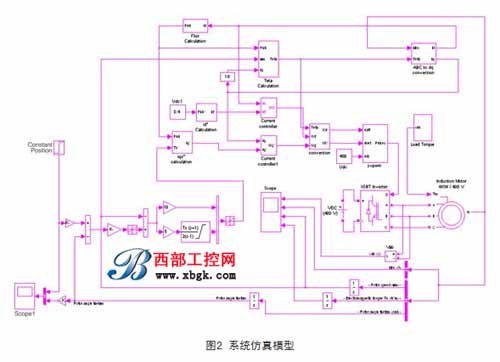
根据svpwm矢量控制的原理,在matlab/simulink下建立系统的仿真模型,如图2所示。整个仿真模型主要由电机本体模块、逆变器模块、svpwm生成模块、矢量变换模块、转子磁链位置观测模块等几部分组成。为了使仿真模型更加接近于实际系统,仿真模型中的电机和逆变器模型采用matlab/simulink中simpowersystems模块中的模型,相当于实际系统中的硬件部分。而其他模型是利用simulink中各个基本模块搭建起来的子系统,并通过封装技术将其封装而成,在实际系统中可以利用软件实现。
位置、转速及电流pi调节器
在系统中有四个pi调节器,分别是位置p调节器,转速pi调节器,转矩电流pi调节器,励磁电流pi调节器。这四个pi调节器的输出都需要限幅,其中位置调节器输出的限幅值为电机能够输出的最大转速,转速调节器输出的限幅值为电机能够输出的最大转矩,两个电流pi控制器的限幅为电压空间矢量的最大电压。另外,这四个pi调节器参数的设置是关系到系统能否稳定的关键,也是系统仿真调试时的难点。因为四个pi调节器是相互关联的任何一个调节器参数的变化都会引起系统的不稳定。对于这四个pi控制器参数的调试经验非常重要,首先根据经验确定四个pi控制器参数的大致范围;然后在这一范围内慢慢调,一般情况下外环即位置环的p参数对系统的影响较为明显,所以一般情况下pi参数的调节顺序为先外环(位置)后内环(电流环),先比例系数后积分系数。
仿真实验中,通过反复的调试,最后得到的各个pi参数如下:
位置p调节器kp=20;
转速pi调节器kp=10,ki=5;
转矩电流pi调节器kp=200,ki=70;
励磁电流pi调节器kp=200,ki=70。
svpwm生成模块
svpwm生成模块是该仿真系统中的关键部分,该模块以电压矢量两相静止坐标系的分量vα、vβ作为输入内部给以开关周期tpwm信号,其内部通过电压矢量区间判断,根据输入量产生x、y、z,然后计算功率器件导通时间,再由区间信号及导通时间产生的svpwm脉冲信号控制逆变器的工作模式,结构如图3所示。

仿真结果及分析
仿真参数为三相异步电机额定电压400v,频率为50hz,rr=1.395ω,rs=1.405ω,l1r=0.005839h,l1s=0.005839h,lm=0.1722h,电机极对数p=2,电机额定功率pn=4kw,转动惯量j=0.0131kg·m2。仿真结果如图4所示。
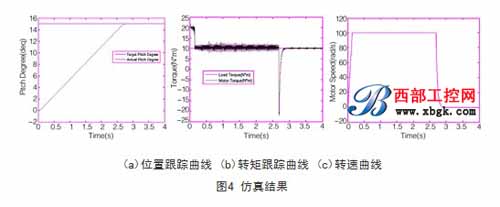
结语
仿真结果表明,在带负载情况下,系统具有良好的动态跟随性,能很快达到稳定运行状态,也证明本文中设计的位置伺服矢量控制系统的可行性。

