1 引言
当前市场流行的变速恒频风力发电系统主要有两种:一种为双馈发电机加转子变流器定转子分别并网的双馈方式;另一种为永磁直驱发电机加全功率变流器并网方式。前者发展时间比较长,技术相对成熟,但存在发电机控制复杂、后期维护工作量大、齿轮箱等部件易出故障、维修不方便等缺点。后者具有控制简单、风能利用率高、利于电网安全稳定运行等优点,因此,它更能代表未来风电机组的发展方向。永磁直驱风电机组并网变流器在国内的研究还时间不长,本文对永磁直驱风电机组双pwm控制并网变流器的原理、拓扑结构、控制策略进行了研究,并进行搭建试验平台进行了相应的试验,达到了预定的效果。
2 双pwm变流器系统拓扑原理
本文采用的永磁直驱双pwm风电变流器的拓扑结构如下:
如图1所示,电机侧变流器采用三相igbt桥,通过pwm控制实现整流,电网侧变流器也采用三相igbt桥,通过pwm控制实现逆变,两个变流器中间直流母线加电容器作为直流支撑,这一拓扑结构解决了采用二极管整流桥具有的非线性特性、导致整流器输入侧电流波形畸变的缺点,因此采用pwm整流技术,将频率和幅值变化的交流电整流成恒定直流。此时pwm整流器可以同时实现整流和boost电路的升压作用。
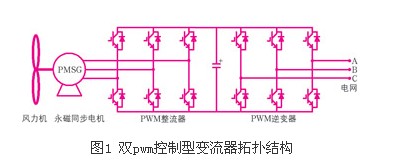
pwm整流器通过解耦控制,可以实现发电机的单位功率因数输出。通过矢量控制技术来控制发电机在不同运行环境下,可以实现发电机最大转矩、最大效率、最小损耗控制。可见整个发电系统控制方法灵活,可以有针对性地提高系统的运行特性。
3 网侧变流器控制策略
针对图2-1所示拓扑结构,网侧变流器数学模型[5]:
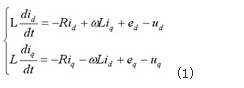
式中:id,iq为交流侧电流矢量的dq轴分量;
ud,uq为交流侧电压矢量的dq轴分量;
ed,eq为电网电压矢量的dq轴分量。
根据式(1)可以设计出双闭环的网侧变流器控制策略,如图2所示。
网侧变流器用igbt作为开关器件,igbt为双向开关管,所以网侧变流器可做四象限变流器。当交流侧输入功率大于直流负载消耗的功率时,多余的功率会使直流母线电压上升,反之则直流母线电压下降。也就是说,直流母线电压与变流器吸收的有功功率有关,因此调节d轴电流给定值i*d即可调节直流母线电压。直流母线电压会随着负载的增大而降低,此时增大i*d使网侧变流器工作在整流状态,从电网吸收更多的能量为直流母线电容充电,提高直流母线电压,反之,则减小i*d是网侧变流器工作在逆变状态,直流母线电容向电网放电,降低直流母线电压。在网侧变流器四象限运行时,控制q轴电流给定值i*d可以控制网侧变流器交流侧输出的功率因数,这就可以灵活控制网侧变流器吸收的无功功率,作为永磁直驱风力发电系统网侧变流器,一般都需要网侧变流器工作在单位功率因数状态下,这时只需把q轴电流给定值i*d设为0。
整个控制策略使用双闭环控制结构,外环为电压环,内环为电流环。电压环给定值i*dc与直流母线电压udc进行比较,经过pi调节器调节,给出d轴电流给定量i*d。q轴电流给定量i*d由需要的功率因数决定,一般都需要单位功率因数输出,则i*d给定为0。i*d、i*q与实际电流的dq轴分量进行比较,误差经pi调节器调节后输出ud、uq,再与各自的解耦补偿项δud、δuq和电网电压扰动前馈补偿项ed、eq运算后得到网侧变流器参考电压给定值u*d、u*q,再经过坐标变换得到两相静止坐标αβ轴系下的电压分量u*α、u*β,最后送入svpwm发生器给出网侧变流器各开关器件的驱动信号。
4 机侧变流器控制策略
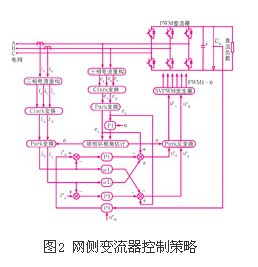
永磁直驱风力发电机有多种控制方式,本文采用有功功率和无功功率解耦控制的方式,可以灵活控制发电机发出的有功功率和无功功率。在dq轴系下,通常把代表无功量的d轴给定值设为0,使发电机全部输出有功功率,并可进一步通过q轴给定值增加算法,比如最大风能跟踪、功率给定控制等[6]。实际中的永磁直驱风力发电系统的风力机和发电机共轴,由于安全和技术的考虑风力机通常设计的转速较慢,这就要求永磁同步发电机也得采用较慢的转速,所以永磁同步风力发电机被设计成多对极,这就带来另一个问题,级数过多使永磁同步风力发电机的轴径增大,难于安装光电码盘,所以准确得到永磁同步发电机机转子位置估计成为控制策略中的难点,本文采用了滑模算法对转子位置进行估计,得到了良好的控制效果[6]。整个控制策略如图3所示。
永磁直驱风力发电系统机侧控制策略需要采集发电机两相电流的模拟量,把电机作为一个闭合节点看待,根据基尔霍夫电流定律,电机输出交流电流ia+ib+ic=0从而可以对两相电流进行重构,若已知电流ia和ib则可得到电流ic=-(ia+ib)。对三相电流进行三相坐标系到两相静止坐标系的clark变换,再进行两相静止坐标系到两相旋转坐标系的park变换,分解得到两相旋转dq轴系下的电流分量,关于坐标变换理论在很多文献都有详细描述,这里不再赘述[2][5]。变换后的dq轴系电流分量通过pi调节器得到需要给定的ud和uq分量,再经过park反变换得到两相静止坐标系下需要给定的uα和uβ分量,最后送入svpwm发生器,得到机侧变流器三相桥6个开关器件的开关信号。在park变换和park反变换的过程中需要使用电机转子位置的电角度,本系统通过滑模观测法得到转子位置的电角度。
5 试验及波形
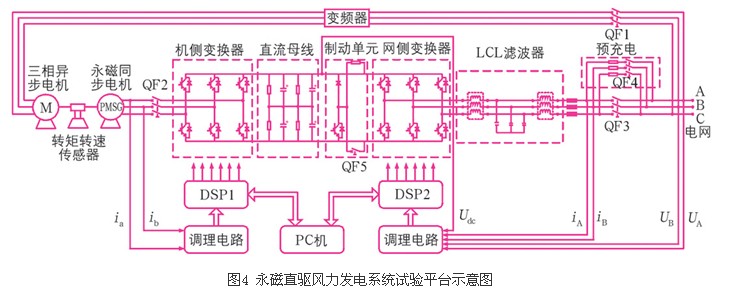
为了对本文提出的永磁直驱风力发电系统的控制策略进行试验验证,本文设计并构建了一套完整的10kw永磁直驱风力发电系统试验平台,其原理如图4所示。为了模拟实际风力发电机由于风力大小引起的速度变化,试验平台采用了变频器拖动15kw异步发电机通过齿轮箱降速带动10kw永磁发电机发电,如图5所示为平台外观。整个系统采用多cpu的主从式数字分布控制系统,主要设备包括变频器、三相异步发电机、齿轮箱、永磁同步电机、用于观测的转矩转速传感器、背靠背式pwm变流器、网侧lcl滤波器、变压器、电压电流传感器等;控制系统有双dsp结构的永磁直驱控制电路、对电压电流采样进行调理的调理电路、驱动igbt的驱动电路以及调试pc机与dsp控制电路的通信、人机接口等。
机侧变流器和网侧变流器分别使用dsp控制电路对其进行控制,如图4所示,为叙述容易机侧控制电路命名为dsp1,网侧控制电路命名为dsp2,两套dsp控制电路均使用ti公司生产的tms320lf2812芯片负责控制算法,用c语言编程,dsp输出pwm控制信号控制igbt桥臂开通或关断。试验系统采样使用lem公司的电压电流传感器。单独调试网侧变流器时,由于直流母线电容的存在,上电时不能使du/dt过大,造成电容损坏,所以试验平台增加了预充电电路,也可通过调压器缓慢升高直流母线电压达到同样的效果,直流母线放电使用了制动电路。
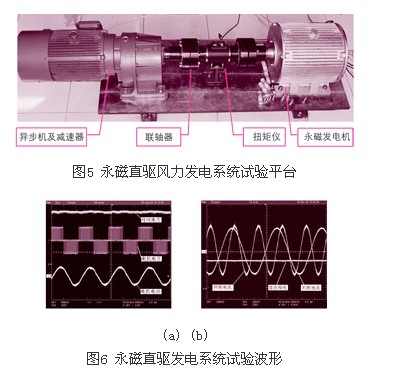
试验中首先对直流母线预充电以免造成冲击,然后启动网侧控制程序,建立直流母线,再启动机侧控制程序,之后断开直流负载,完成机侧和网侧变流器能量交换,试验波形如图6所示。图6中直流母线电压稳定在450v,达到最低母线电压要求,机侧电压和母线电压检测通过高压差分探头,连接到永磁电机三相输出端和直流母线两端。通过变频器提高拖动三相异步电机转速从而提高永磁同步发电机的转速,随着转速提高逐渐加大发电输出功率。当电机达到额定转速时,电机侧pwm电压波形及输出电流波形如图6(a)。图6(b)示出了发电机输出满功率时机侧和网侧电流波形,这里q轴电流给定为0,进行单位功率因数发电。电流探头选择100mv/a的档位,从图6中可以看出电机侧及电网侧变流器电流控制良好。
6 结束语
本文对永磁直驱风力发电系统机侧变流器和网侧变流器的控制策略进行了分析和研究。建立了机侧变流器和网侧变流器的两相旋转坐标轴系下的数学模型,在此数学模型的基础上对机侧变流器和网侧变流器解耦控制进行了研究,并给出了电网电压定向的矢量控制策略。机侧变流器对发电机输出电流进行控制,使发电机输出电流为正弦,保证了发电机平滑运转。网侧变流器对母线电压进行控制,使母线电压保持恒定,对交流侧输出电流也进行解耦控制,可灵活控制有功功率和无功功率,保证网侧变流器在单位下运行。

