周峰:18811848019
当PLC投入运行后,其工作过程一般分为三个阶段,即输入采样、用户程序执行和输出刷新三个阶段。完成上述三个阶段称作一个扫描周期。在整个运行期间,PLC的CPU以一定的扫描速度重复执行上述三个阶段。
输入采样
在输入采样阶段,PLC以扫描方式依次地读入所有输入状态和数据,并将它们存入I/O映象区中的相应得单元内。输入采样结束后,转入用户程序执行和输出刷新阶段。在这两个阶段中,即使输入状态和数据发生变化,I/O映象区中的相应单元的状态和数据也不会改变。因此,如果输入是脉冲信号,则该脉冲信号的宽度必须大于一个扫描周期,才能保证在任何情况下,该输入均能被读入。用户程序执行
在用户程序执行阶段,PLC总是按由上而下的顺序依次地扫描用户程序(梯形图)。在扫描每一条梯形图时,又总是先扫描梯形图左边的由各触点构成的控制线路,并按先左后右、先上后下的顺序对由触点构成的控制线路进行逻辑运算,然后根据逻辑运算的结果,刷新该逻辑线圈在系统RAM存储区中对应位的状态;或者刷新该输出线圈在I/O映象区中对应位的状态;或者确定是否要执行该梯形图所规定的特殊功能指令。即,在用户程序执行过程中,只有输入点在I/O映象区内的状态和数据不会发生变化,而其他输出点和软设备在I/O映象区或系统RAM存储区内的状态和数据都有可能发生变化,而且排在上面的梯形图,其程序执行结果会对排在下面的凡是用到这些线圈或数据的梯形图起作用;相反,排在下面的梯形图,其被刷新的逻辑线圈的状态或数据只能到下一个扫描周期才能对排在其上面的程序起作用。| S7-1500R/H 冗余系统 |
CPU | 6ES75173HP000AB0 | SIMATIC S7-1500H,CPU 1517H-3PN, 2 MB 程序, 8 MB 数据;接口1:2x PN;接口2:1x PN; 接口3:H-SYNC |
| 6ES75152RM000AB0 | SIMATIC S7-1500R,CPU 1515R-2PN, 500KB 程序,3 MB 数据;接口1:2x PN;接口2:1x PN | ||
| 6ES75131RL000AB0 | SIMATIC S7-1500R,CPU 1513R-1PN,300KB 程序,1.5 MB 数据;接口1:2x PN | ||
| 6ES75000HP000AB0 | SIMATIC S7-1500H, CPU 1517H系统套装,包括 2x CPU 1517H-3 PN, 4x 同步模块(10米), 2x 同步光纤(1米),不含内存卡 |
||
| 同步模块 | 6ES79601CB000AA5 | SIMATIC S7-1500H 10米同步模块 | |
| 6ES79601FB000AA5 | SIMATIC S7-1500H 10公里同步模块 | ||
| 同步光纤 | 6ES79601BB005AA5 | SIMATIC S7-1500H 1米同步光纤 | |
| 6ES79601BC005AA5 | SIMATIC S7-1500H 2米同步光纤 | ||
| 6ES79601CB005AA5 | SIMATIC S7-1500H 10米同步光纤 |
6ES7513-1RL00-0AB0现货销售,西门子SIMATIC S7-1500R,CPU 1513R-1PN,300KB 程序,1.5 MB 数据;接口1:2x PN
指令名称:回原点指令
功能:使轴归位,设置参考点,用来将轴坐标与实际的物理驱动器位置进行匹配。
使用要点:轴做绝对位置定位前一定要触发MC_Home指令。
『注意』部分输入/输出管脚没有具体介绍,请用户参考MC_Power指令中的说明。
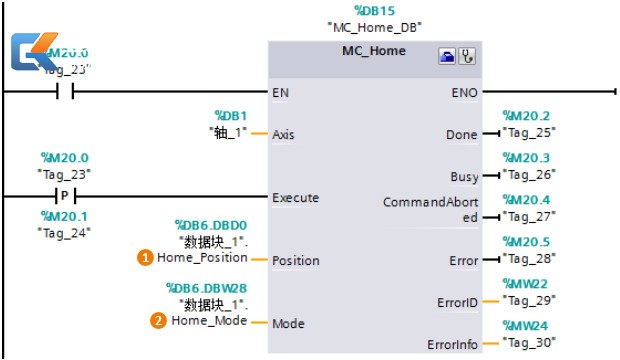
①Position: 位置值
- Mode = 1时:对当前轴位置的修正值
- Mode = 0,2,3时:轴的绝对位置值
②Mode: 回原点模式值
- Mode = 0:绝对式直接回零点,轴的位置值为参数“Position”的值
- Mode = 1:相对式直接回零点,轴的位置值等于当前轴位置 + 参数“Position”的值
- Mode = 2:被动回零点,轴的位置值为参数“Position”的值
- Mode = 3:主动回零点,轴的位置值为参数“Position”的值
下面详细介绍模式0和模式1.
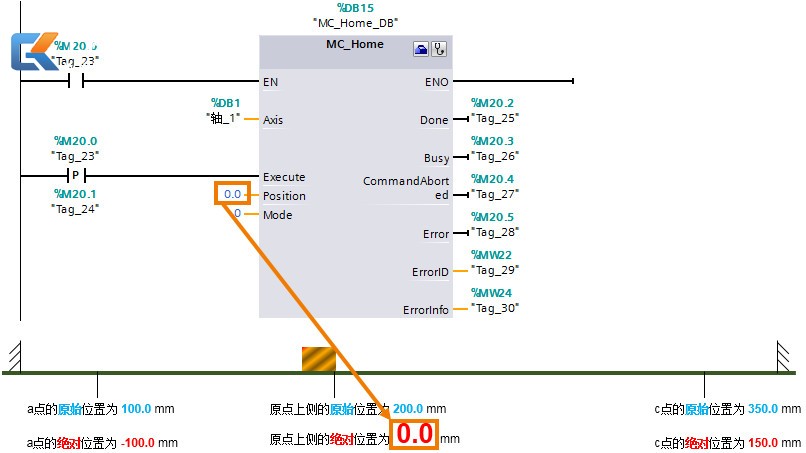
Mode = 0绝对式直接回原点
以下图为例进行说明。该模式下的MC_Home指令触发后轴并不运行,也不会去寻找原点开关。指令执行后的结果是:轴的坐标值更直接新成新的坐标,新的坐标值就是MC_Home指令的“Position”管脚的数值。例子中,“Position”=0.0mm,则轴的当前坐标值也就更新成了0.0mm。该坐标值属于“绝对”坐标值,也就是相当于轴已经建立了绝对坐标系,可以进行绝对运动。
『优点』MC_Home的该模式可以让用户在没有原点开关的情况下,进行绝对运动操作。