


用于三维区域监控的安全照相系统SafetyEYE是由皮尔磁公司和戴姆勒-克莱斯勒公司共同研究开发的。SafetyEYE能够在危险区域周围设置一个特定的、三维的保护区域,检测区域可以快速灵活地在PC机上进行配置。SafetyEYE可以在一个系统中实现保护、控制和监测。安全部分的用户从增长的灵活性和生产力中获利,而保全部分则得益于连续的目标监控和访问保护。

图一 SafetyEYE的外观
SafetyEYE不仅仅是一个传感器,它是在三维空间中安全检测目标的技术基础,该安全照相系统广泛适用于工业领域,如机器中心、轮胎、包装工业,高空作业系统,车辆自动停放等等。
系统构成及应用
整个系统由三部分组成:传感器单元、一台高性能计算机和一个可编程的安全控制系统。传感装置由三个高精度的动态照相机组成,产生监测空间的图像数据。高性能的计算机作为分析单元,通过光缆接收来自照相机的图像数据并使用安全的算法产生空间图像,这样才可能从三维对目标进行观测并且精确定义它们的位置。将此信息输入到系统中配置的检测区域用以确定是否有目标进入危险区域。例如,高性能的计算机将图像处理结果传输到PSS可编程安全控制器,PSS控制器的输入和输出直接与机器自身的控制器连接,并负责整个SafetyEYE系统的运行。如果分析单元给出的信号说明有目标进入危险区域,那么配置系统的输出就将被切断,与其连接的外围设备也可以通过SafetyBUS p的安全总线系统切断,将来还有可能通过SafetyNET p 以太网来实现。检测区域、警告区域以及其他一些操作安全照相系统所需的参数都可以通过配置好的PC机和专业的软件包来进行设定。
安全照相系统与传统的传感技术相比有明显的差别,它一个系统就可以实现保护、控制和监测。SafetyEYE也可以执行标准的控制功能,并且可以监测一些独立的区域,这样不仅降低了成本,而且最大限度地减少了元器件的数量。它能够直接连到总线系统如Safety BUS p甚至将来的SafetyNET p,更好的节约了原材料和安装时间。SafetyEYE能够以鸟瞰的方式保护车间,使得人和机器和谐共存。利用安全照相系统能够满足最广范围内的机械工程应用的要求。
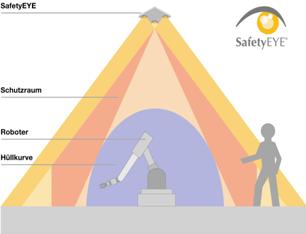
以一个利用SafetyEYE系统进行监控的机器人工作站为例,该工作站在工作的时候完全开放,不需要任何防护栅栏。在工作站上方安装传感装置,全面监测机器人活动的范围。从开始阶段就将被人为操控的可能性排除在外,监视器显示出正在工作的安全技术:颜色、半透明立方体及三维的警告和检测区域被输入到照相机采集来的图像信息中,如图二所示。机器人在其工作周期内在这些区域内活动。将危险区域定义为虚拟层的形式,包含警告区域和检测区域。只有进入这两个区域的目标才存在潜在危险。

图二
SafetyEYE系统特性:目标进入检测区域并不会自动导致紧急停车,当人进入到虚拟检测区域的某点而机器人还需要几秒就将到达的时候,控制技术会保证机器人减速前进。如果人发觉警告信号退出危险区域,则机器人恢复至正常速度前进。只有当操作人员进入到警告区域时才会造成紧急停车。在SafetyEYE系统的帮助下,可以精确控制工作流程并且安全措施灵活。
PC机实现配置警告和保护区域
为了便于管理,可以将检测区域和警告区域组合成一个复杂的区域,这可以快速、直观地在PC中进行配置。区域分布如图三所示。
图三:SafetyEYE区域的设定
如果一台机器不同的操作模态要求不同的区域设置,可以在机器的工作周期中通过安全总线系统SafetyBUS p 或者数字输入的PSS可编程的安全控制系统进行动态的切换,使用非常灵活。一旦检测区域确定下来,使用者也可以在SafetyEYE系统的配置器中通过鼠标进行改变,因此,对于检测区域进行的监控基础不再是技术需求而是用户对使用周期的要求,这样设计起来可以享有最大的灵活机动性,SafetyEYE系统的安装和检测区域的设置仅需几个小时的时间,而常规保护装置的定位、安装、检查往往需要花去至少一天的时间,相比较而言,使用SafetyEYE系统更加地经济实惠,当有人进入危险区域时,一个集成的诊断功能可以将停工期缩到最短。




