


1 引言
传统的led生产线上的产品质量控制主要依靠经过训练过的技师通过目视来实现,由于人眼的主观性,很难对产品的质量进行精确、稳定地控制。与人眼相比,机器视觉系统具有高速度、精确性、可重复性、长期工作的稳定性。因此将机器视觉技术应用在led的光学检测上可在很大程度上提高产品质量控制的精度及速度。
2 led数码管检测对ccd的要求
待检产品为七段led数码管如图1所示:
(1) 目的
用ccd检测产品亮度不均匀程度,提高生产效率,减少人为因素。对于“8”字产品(如图1)就是量测每段(segment)的相对亮度,判断每段之间的相对亮度差值(指亮度不均匀比率、泄光率是否在合理范围内,以此来判断产品是否为良品。同样地对于点阵产品判断是每个点)。
(2) 产品条件限制
分两种情况,一是指极端型产品;另一是指普通型产品:
极端型产品情况:“8”字产品段之间最小间隔(d)0.3mm,段面积a=2×0.6=1.2mm2(如图2),段最低亮度值0.1mcd;普通型产品情况:“8”字产品段之间最小间隔(d)0.3mm,段面积a=4×0.8=3.2mm2,段最低亮度值0.8mcd。
(3) 判断亮度差值标准
亮度不均匀比率1:1.3,指每段(或点)之间亮度值比率;
泄光率1:0.2,指点亮段(或点)与不点亮段(或点)亮度值比率。
在(2)、(3)项目条件下,要求ccd最小判断段数(或点数)应不少于64个,其次,一次测完64段(或点)时间不大于3s。
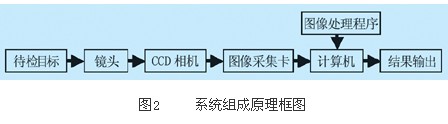
3 硬件方案
硬件系统系统由ccd相机、镜头、相机支架、图像采集卡、遮光罩、计算机、结果输出单元等组成,如图2所示。
(1) 相机
本系统相机选用日本jai公司的cv-a1 ccd相机。此相机的主要参数列表如附表。
附表 cv-a1主要性能参数
名称 参数
象元尺寸 4.65′4.65mm2
有效象元数 1392′1040
最大满帧输出 1380′1035
象元时钟 28.64mhz
行频 17.127khz(1672/line)
扫描方式 逐行扫描
帧频 16fps
灵敏度 0.3lux(max gain, 50% video)
信噪比 50db
快门 1/16-1/20000
增益 -0.3-12db(手动)
输出格式 1vpp/75w
谱段 0.4-1.0mm(黑白)
尺寸 29′44′66mm3
重量 150g
功耗 3w/12v
数量 1台
对于要检测的led产品,尺寸为60×40mm,对分辨率为1392×1040的jai相机,按照5%的无效象素的原则,有效成像的分辨率为1300×1000,则系统可以达到的最大象素当量为:
水平方向:60mm/1300pixel≈0.04mm/pixel;
垂直方向:40mm/900pixel ≈0.04mm/pixel。
(2) 镜头
选用computar公司百万象素级1214-mp镜头。该款镜头是针对高分辨力或高像质需求设计,适用对象为1k′1k至2k′2k的相机,应用于本系统可以获得很好的图像清晰度。它的特点是:适用于兆级象素相机的成像;高分辨力超大变倍镜头;在整个屏幕范围内都具有高对比度和高清晰度的图像;紧凑式设计;低变形率。
由于对工作距离没有特殊的要求,因而选用12mm的镜头就可以保证获得全帧图像。
(3) 图像采集卡
选用coreco公司的pc2-vision,该采集除了能支持cv-ai相机外,还可支持wit8.0软件。
4 wit视觉软件介绍
wit是一种公认的功能强大的用于开发和传递图像分析应用的软件包。wit运用一种叫做“igraph”的框图结构来描述算法,同时工程人员也通过绘制方框图表来做出解决方案。在igraph中的每一方框(也称为一个“operator”)都代表一个功能,通常为一种图像处理和分析工具。wit提供一种快捷高效的设计环境,它具有完备的operator库,强大的流控制特性和operator的点击式重排,它通过mmx优化库自动在多cpu系统确定执行时间。wit igraph可以在visual basic和visual c++环境中执行,这样使wit非常适于机器视觉中oem产品的开发,生物制药,实验室科学和研究中。
wit处理库包含300多个处理函数,这些函数都可以从igraph中连接。连接指定一个operator的输出到另一个operator的输入。每一个operator的参数都可以很容易的有弹出式对话框来设定。例如:旋转operator有一个对编程系数进行编辑的核心编辑器。当算法完成后,igaph可以通过点击按钮的方式来执行。wit包括一些流控制operator用来执行循环和条件分支等复杂的算法。wit还有一些用来处理数据的operator,支持sub-fields从数据对象中的分离(例如,在一幅图像中斑点的个数),给数据阵列分类(通过斑点的尺寸进行分类)以及对各操作进行排列(在显示之前给每一个斑点加标签)。
为了进一步简化开发,各种igraph可以嵌套在一起用一个新的图标来表示。嵌套的igraph和简单的igraph都可以用同一种模式同一种工具来执行和调试。开发人员可以创建它们自己的图像处理函数并把它们加入到图像处理库中。
wit可以对从采集卡采来的或从磁盘图像文件中读取的实时相机数据进行处理。为了最大限度的加强图像处理和时实操作功能,wit的图像库对自动利用多cpu计算机资源进行了优化。另外,wit能够把operator在分布的处理网络和嵌入式视觉处理器执行。
wit交互式的框图界面加速了算法的开发:显示数据和调整参数更加容易。每一个连结和operator的属性都可以通过弹出式对话框来修改。wit运用图像注解来提高可读性。当执行式图标会闪烁,传输时的红点表示数据运动。
图像显示格式: 用x和y值表示某点;精确显示像素值;图像的组控制。
wit可以通过一个称作ewit的程序在不同的计算机上并行执行或通过pci总线与许多coreco mamba卡进行通信。ewit支持wit的大部分功能,运用图形应用界面,通过tcp/ip或特殊硬件的特定通道进行通信。因为ewit具有wit的大部分功能,ewit能够通过运用wit管理器来设置以支持各种采集卡和其他硬件,并把这些服务提供给wit在igraph中执行。
5 软件设计
(1) 设计原理
在wit中通过动态采集led的图像后,首先对其进行二值化,以blob算法找出其中每一字段的位置,然后根据这些位置参数读出每个像素的所有参数。通过求得blob内的所有像素的灰度平均值。
(2) 软件流程图(如图3所示)

(4) wit igraph实现(如图4所示)

6 测试结果及注意事项
对r、g、b三种不同颜色led进行了测试,实验结果(如图5)表明,运行结果能满足led产品检测要求。以下几个问题值得注意:检测对外部条件要求较高,应在暗室或遮光罩内进行,避免杂光噪音的干扰;电子快门和暴光时间不能过长,应保证视场中最亮部分的灰度值不大于255;相机的自动增益功能须设为off,手动增益设为0;为保证ccd不饱和,可在ccd前加衰减片;电子快门和暴光时间不能过短,应保证视场中最暗部分的灰度值大于二值化阈值。

7 结束语
随着机器视觉技术的迅速发展,传统的生产线上的人眼目视检测将越来越多的被机器视觉系统所取代,构建适合其应用的机器视觉系统,必将在很大程度上提高产品的质量控制以及生产效率。





